
-
#1830
por otroatletico en 06 Ago, 2012 18:11 -
Las extinciones masivas provocan alteraciones a largo plazo del ritmo de evolución
BIOLOGÍA
Moluscos fósiles. (Foto: Susan Kidwell)
Un nuevo estudio indica que las extinciones en masa afectan al ritmo de evolución, no sólo en el período inmediatamente posterior a la catástrofe, sino durante los siguientes millones de años.
Se tiende a pensar que cuando se desencadena una extinción en masa, llega un periodo de recuperación tras el cual el ritmo evolutivo vuelve a la normalidad. Sin embargo, la conclusión a la que han llegado Andrew Z. Krug y David Jablonski de la Universidad de Chicago, es que la velocidad de la evolución no tiene por qué ser la misma de antes. A veces pasa a ser más rápida, y a veces más lenta. El ritmo evolutivo varía, y esa variación es permanente hasta la siguiente extinción masiva.
La investigación de Krug y Jablonski se basa en el trabajo de David Raup, profesor emérito de ciencias geofísicas, y Michael Foote, profesor de ciencias geofísicas, ambos de la Universidad de Chicago.
En 1978, Raup publicó un método para determinar el ritmo de extinción de organismos. Su método consistía en monitorizar la supervivencia de un grupo de organismos que se hubieran originado todos durante un período de tiempo específico y distribuirlos por época de desaparición. El método sería comparable al de recopilar datos del censo sobre todos los individuos nacidos el 1 de enero de 1899, hacer un seguimiento de su longevidad, y luego encontrar que la epidemia de gripe de 1918 produjo un aumento en la mortalidad de este grupo.
Foote se unió a esta línea de investigación en 2001, mostrando que el método de Raup funcionaba igual de bien para determinar los ritmos de aparición de especies que para determinar los ritmos de extinción. -
#1831 por otroatletico en 06 Ago, 2012 18:13
-
Ya es posible observar ópticamente numerosos planetas de sistemas solares cercanos
ASTRONOMÍA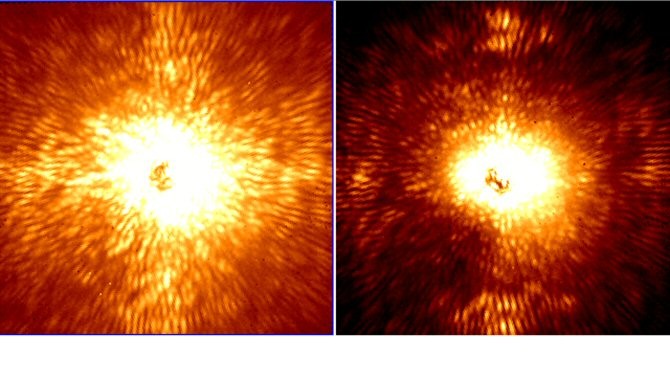
Dos imágenes de HD 157728. A la derecha, con el sistema del Project 1640 activo. (Foto roject 1640)
roject 1640)
A pesar que en los últimos años se han detectado cientos de planetas en órbita alrededor de otras estrellas mediante métodos de detección indirectos, es dificilísimo verlos directamente en una imagen. Esto ocurre sobre todo porque la luz que emiten las estrellas es muchos millones de veces más brillante que la luz reflejada por los planetas.
Un avanzado sistema de captación de imágenes mediante telescopio, que comenzó a tomar datos en junio, es el primero de su tipo capaz de captar imágenes de bastantes planetas que orbitan en torno a estrellas de otros sistemas solares.
El conjunto colaborativo de instrumentación de tecnología y software avanzados, denominado Project 1640, ahora está funcionando en el telescopio Hale del Observatorio del Monte Palomar en California, después de más de seis años de desarrollo por investigadores e ingenieros en el Museo Americano de Historia Natural, el Instituto Tecnológico de California y el Laboratorio de Propulsión a Chorro (JPL) de la NASA.
Las primeras imágenes del proyecto que demuestran una nueva técnica que crea "agujeros oscuros" muy precisos alrededor de las estrellas de interés han sido presentadas recientemente.
Gracias al trabajo del equipo de Ben R. Oppenheimer, el problema de la luz estelar se podrá solucionar, y a partir de aquí, las investigaciones sobre planetas de otros sistemas solares experimentarán un gran salto. Una vez que los astrónomos puedan ver a estos exoplanetas, podrán determinar los colores que emiten, las composiciones químicas de sus atmósferas y hasta las características físicas de sus superficies. E incluso, cuando las mediciones directas se lleven a cabo desde el espacio, será posible buscar signos de vida en otros mundos, tal como aventura Oppenheimer. -
#1832 por otroatletico en 06 Ago, 2012 18:15
-
Fotografían por vez primera la sombra de un átomo aislado
FÍSICA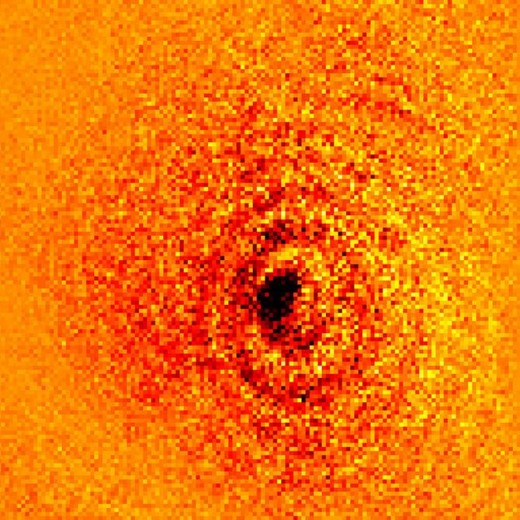
La sombra de un átomo. (Foto: U. Griffith)
En una hazaña tecnológica nunca antes lograda, un equipo de científicos ha conseguido, por vez primera, fotografiar la sombra de un átomo aislado.
La primicia es obra del equipo de Erik Streed y Dave Kielpinski, del Centro de Dinámica Cuántica, dependiente de la Universidad Griffith, en Brisbane, Australia, y culmina cinco años de trabajo.
El propósito de la investigación era averiguar cuál es el número mínimo de átomos necesario para proyectar una sombra, y ha resultado que basta con uno solo.
Para este trabajo pionero, ha resultado crucial un microscopio de resolución muy elevada, el cual hace que la sombra sea lo bastante oscura para su observación. No se tiene conocimiento de ningún otro equipamiento en el mundo que tenga la capacidad para obtener imágenes ópticas de esta clase.
Los investigadores atraparon iones individuales del elemento químico iterbio y los expusieron a una frecuencia específica de luz. Bajo esta luz, se proyectó la sombra del átomo sobre un detector, y una cámara digital pudo captar la imagen.
Usando el microscopio de resolución muy alta, fue posible concentrar la imagen en el área más pequeña que se haya alcanzado hasta hoy, creando una imagen más oscura y por tanto más fácil de observar.
Experimentos como éste ayudan a confirmar conceptos de la física atómica y pueden ser útiles para la computación cuántica así como para la biomicroscopía. -
#1833 por otroatletico en 06 Ago, 2012 18:19
-
El robot Curiosity se comunica desde la superficie de Marte
ASTRONÁUTICA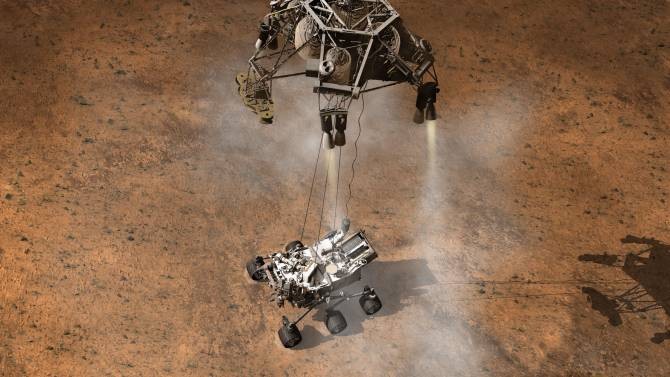
(Foto: JPL)
A pesar de las dificultades y de la incertidumbre por la utilización de un método de aterrizaje novedoso, las cosas se desarrollaron de la forma prevista y el robot Curiosity se posó sin novedad en la superficie de Marte, a las 05:31 UTC del 6 de agosto (hora de la Tierra).
Todo fue bien en la secuencia de descenso y la compleja sonda espacial, a la que le sobró casi el 25 por ciento del combustible almacenado a bordo, tocó la superficie en un punto estimado cuyas coordenadas son 137,44 grados (longitud), -4,59 grados (latitud), en el interior del cráter Gale. Apenas unos minutos después, el robot, demostrando el éxito de la maniobra, enviaba sus primeras fotos de baja resolución a través de la sonda Mars Odyssey, que pasaba en esos momentos sobre ella. Las imágenes, que aún mostraban el polvo en suspensión levantando por el aterrizaje, enseñaban las ruedas del vehículo y su sombra, así como un escenario aparentemente libre de rocas.
La llegada del Curiosity se inició el 4 de agosto, con la entrada de la nave en la esfera de influencia gravitatoria de Marte. Eso la hizo acelerar progresivamente. Los ingenieros no necesitaron utilizar sus últimas oportunidades de corrección de la trayectoria, que consideraron perfectamente establecida. Por fin, a las 05:14 del 6 de agosto, la Curiosity abandonó la etapa de crucero que había estado utilizando durante el viaje, desde el día del despegue, y que había proporcionado energía, comunicaciones y propulsión al conjunto. Cinco minutos más tarde, se expulsaban dos pesos (CMBD) de 75 kg cada uno utilizados para mantener el equilibrio, los cuales se estrellarían por su cuenta contra Marte. De este modo quedaba desplazado el centro de masas de la nave y se obtenía una cierta sustentación. A las 05:24 UTC, el vehículo, equipado con su escudo de protección térmica, efectuaba su primer contacto con la atmósfera marciana, a unos 125 km de altitud y a una velocidad de 6,1 km/s, a 700 km de distancia del punto de aterrizaje. Cuatro minutos después, se expulsaban otros seis pesos de 25 kg para orientar correctamente la nave, y al mismo tiempo se extendía el paracaídas, a unos 10 km de altitud y una velocidad de 100 m/s. Con la evidente desaceleración en marcha, se liberó el escudo térmico inferior (05:29 UTC), y finalmente la carcasa superior junto al paracaídas, que había reducido suficientemente la marcha del descenso para que pudieran entrar en servicio los ocho motores de la “grúa espacial” (05:30 UTC). Con la velocidad de bajada a cero, el vehículo se mantuvo a unos 27 metros de altura y empezó a descolgar al robot Curiosity con varios cables. Una vez extendidos, se reanudó la bajada, hasta que éste tocó el suelo, a unos 0,75 m/s, los cables se cortaron y la grúa se alejó de la zona para estrellarse.
De inmediato, el robot utilizó las cámaras de navegación para tomar algunas imágenes, aún con la óptica tapada por una cubierta transparente, que evitó que el polvo la ensuciara. Unos tres minutos después del aterrizaje, estas imágenes fueron transmitidas a la Tierra y mostradas en el centro de control, que las recibió de forma entusiasta.
Se trataba de imágenes en blanco y negro, ya que la cámara principal se encontraba aún plegada en su mástil, lo mismo que la antena de alta ganancia, que permitirá el contacto directo con la Tierra, sin pasar por las sondas en órbita alrededor de Marte. Hasta entonces, los controladores estarían limitados a la recepción de datos en las oportunidades de sobrevuelo de la MRO, la Mars Odyssey y la Mars Express.
Tras la rueda de prensa, regresó la actividad al centro de control, con un nuevo sobrevuelo de la Mars Odyssey que trajo más fotografías, de mejor calidad, y algunos datos científicos. En sucesivas oportunidades se enviarían otros elementos interesantes, como las imágenes tomadas durante el descenso propiamente dicho.
Los próximos días estarán protagonizados por un cuidadoso calendario de eventos, durante los cuales, poco a poco, se comprobarán todos los sistemas del robot, se establecerán comunicaciones estables y se enviarán imágenes de alta calidad y panoramas. Aún transcurrirán algunos días antes de que el Curiosity inicie sus primeros movimientos.
Durante la rueda de prensa, la dirección del programa no solamente felicitó a los participantes estadounidenses, sino también a las naciones colaboradoras, entre las cuales se encuentra España, que ha contribuido con varios elementos. Uno de ellos es la antena de alta ganancia, de diseño novedoso, construida por Astrium España.
Llevar a cabo la transmisión de datos desde Marte a la Tierra es más difícil de lo que parece. El rover tiene que saber dónde se encuentra en cada momento para saber dónde está la Tierra y apuntar hacia ella para comunicarse. El Curiosity ha incorporado la novedad de que es la antena la que se orienta automáticamente apuntando a la Tierra para poder comunicar sus datos. De esta manera, el rover no tiene que gastar energía moviendo todo el vehículo para apuntar su antena.
Curiosity tiene la capacidad de comunicarse directamente con la Tierra a través de sus enlaces en banda X con la red de espacio profundo compuesta de tres antenas gigantes de 70 metros dispuestas estratégicamente en el planeta (Pasadena, Canberra y Madrid) para que por lo menos siempre haya una en la línea de vista de la transmisiones.
Las comunicaciones en banda X utilizan un amplificador de potencia de 15 vatios alimentado por el transpondedor de espacio profundo del rover. España, a través de EADS CASA Espacio, filial de Astrium, ha suministrado la antena de alta ganancia, de forma hexagonal de unos 30 centímetros de diámetro, montada en la plataforma superior del Rover. Con esta antena, se puede transmitir a 800bits por segundo o más rápido a las antenas de 70 metros de la red de espacio profundo. Esta antena se basa en la tecnología de radiadores impresos desarrollada por la empresa, tiene capacidad de transmisión y recepción, y ha demostrado sus altas prestaciones en misiones de observación como Envisat, de telecomunicaciones como Galileo y Spainsat y científicas como Rosetta. Además tiene la citada capacidad de apuntamiento automático gracias al mecanismo especial suministrado por la empresa Sener. Esta antena será utilizada para enviar órdenes al rover todas las mañanas. Así mismo, podrá utilizarse para devolver información a Tierra a un bajo nivel de transmisión de datos debido a la limitada potencia del rover, el tamaño de la antena y la gran distancia que les separa.
Otra posibilidad de comunicarse que tiene Curiosity es a través de sus enlaces UHF contactando con los satélites que orbitan Marte. Son oportunidades cortas de unos 10 minutos, pero su proximidad permite una transmisión más rápida de datos que el contacto directo. Estos orbitadores con sus transmisores de mayor potencia y antenas de mayor tamaño retransmitirán esta información posteriormente a la red de espacio profundo en la Tierra. Uno de estos satélites puede ser el Mars Express de la Agencia Espacial Europea que también cuenta con una antena dicroica de CASA Espacio.
La estación meteorológica del vehículo es asimismo una aportación española, desde el investigador científico principal hasta la construcción del mismo por la otra filial española de Astrium, CRISA, en Tres Cantos. Con ella se medirán diariamente todos los parámetros atmosféricos que se tomarán en cuenta para llevar a cabo la misión, que tendrá una duración de un año marciano (dos años terrestres).
[youtube]http://www.youtube.com/watch?v=hJq5z9kE4lc&feature=player_embedded[/youtube]
[youtube]http://www.youtube.com/watch?v=FVzfDZlEwaU&feature=player_embedded[/youtube]
[youtube]http://www.youtube.com/watch?v=V7VArwqUTeA&feature=player_embedded[/youtube] -
#1834 por otroatletico en 06 Ago, 2012 18:21
-
Anatomía de un récord
BIOLOGÍA
Momento en el que Bolt cruza la meta en los juegos de Londres. (Imagen: Efe)
Usain Bolt reúne las tres cualidades clásicas de unos juegos olímpicos: citius altius fortius. Después de correr los 100 metros lisos en tan sólo 9,63 segundos, el atleta jamaicano todavía es el más rápido, el más alto y el más fuerte del mundo.
A pocos días de cumplir los 27 años, el plusmarquista se encuentra en la edad de máximo rendimiento deportivo sobre pista, según un estudio publicado el año pasado en la revista Age. “El nacimiento marca el rendimiento deportivo, alcanza su máximo a los 26 años, y luego disminuye hasta el día de su muerte”, explica a SINC Jean-François Toussaint, científico francés del Instituto de Investigación Biomédica y Epidemiología del Deporte (IRMES) y coordinador del trabajo.
En los juegos olímpicos, alcanzar un tiempo récord se ha convertido en toda una hazaña. “Ya se han conseguido el 99% de los récords mundiales y, si prevalecen las condiciones actuales, la mitad de ellos no mejorarán mucho más de un 0,05% en 2027”, escribe Toussaint en otra de sus publicaciones. El trabajo, publicado en PLoS ONE, analizó 3.263 récords mundiales desde la celebración de la primera competición olímpica de la era moderna hasta Pekín 2008. Según las conclusiones, los récords fueron habituales entre 1896 y 1968, pero a partir de entonces empezaron a disminuir.
Por si fuera poco, el mismo centro de investigación demostró que en el 64% de las pruebas de atletismo no ha habido mejoras desde 1993, después de analizar los resultados individuales de los mejores deportistas durante el último siglo para establecer una ‘ley de progresión’.
Centésima arriba, centésima abajo, las previsiones estadísticas varían mucho en función del factor que se tenga en cuenta para predecir una nueva marca. Reza D. Noubary, matemático de la Universidad de Bloomsburg (EE UU), calculó que el récord de los 100 metros lisos alcanzaría los 9,40 segundos hacia el año 2040. “Creo que Bolt se podría haber superado si hubiera trabajado el tiempo de reacción. Él está de acuerdo conmigo en que el récord mundial se parará en los 9,40 segundos”, dice a SINC Noubary.
Pero su investigación no evalúa los límites fisiológicos del cuerpo humano. En cambio, Mark W. Denny, investigador de la Universidad de Stanford (EE UU), asegura que se podría predecir la velocidad máxima si se tuvieran en cuenta la fisiología y la mecánica de la locomoción. El científico estadounidense publicó en 2008 un trabajo sobre los límites en galgos, caballos y humanos: “La locomoción de las piernas es un proceso muy complicado”, escribe al principio de su trabajo. Más adelante se refiere al velocista jamaicano y califica sus marcas como “pequeñas mejoras sobre récords anteriores en 100 metros y 200 metros lisos”.
A día de hoy, la mejora de la forma física es más decisiva en unas pruebas que en otras. En el caso del atletismo, el aumento del rendimiento deportivo depende más del equipamiento –como las zapatillas– y la biomecánica de la persona. “La amplitud y la frecuencia de las zancadas tienen que ir muy unidas”, aclara a SINC Joan Antoni Prat, profesor de INEFC en Lleida, y uno de los creadores del Centro de Alto Rendimiento (CAR) de Sant Cugat, en la provincia de Barcelona.
El límite del ser humano existe y está representado por las propias estructuras fisiológicas, dice Piero Galilea, médico del CAR. “Lo difícil es saber dónde está”, añade.
Las fronteras físicas de Usain Bolt son 1,95 metros de altura y 94 kilos de peso. “Aunque tenga que movilizar mucha masa, las piernas largas son una ventaja biomecánica por el efecto de palanca”, aclara el doctor Joan Ramon Barbany, profesor de fisiología del ejercicio de la Universidad de Barcelona (UB).
El matemático Noubary coincide: “Usain Bolt es el ejemplo perfecto que combina las ventajas mecánicas de un hombre alto con las fibras de contracción rápida de un hombre pequeño”. Aparte de la forma física, los expertos señalan que hay otros parámetros que también influyen en las competiciones deportivas, como la dotación genética del atleta.
Los últimos resultados del mapa genético sobre la salud y el rendimiento humanos, publicado en la revista Medicine and Science in sports and exercise en 2009, reunieron 239 variabilidades genéticas relacionadas con la excelencia deportiva, 52 más que en el informe anterior. Algunas de estas expresiones incluyen fenotipos relacionados con la presión sanguínea, la morfología del corazón, y el metabolismo de la insulina y la glucosa.
Los 35 laboratorios acreditados por la Agencia Mundial Antidopaje investigan desde hace años cómo detectar el dopaje genético. Desde los juegos olímpicos de Atenas 2004, el Comité Olímpico Internacional (COI) guarda las muestras de los deportistas durante ocho años por si durante ese tiempo se ha desarrollado alguna técnica que permita detectar sustancias que no se pudieron identificar en su momento.
“Un récord mundial se observa con lupa en una competición internacional”, remarca Jordi Segura, director del Laboratorio de Control Antidopaje del Instituto de Investigación Hospital del Mar (IMIM), y miembro de la comisión médica del COI. Admite a SINC que se siente más justiciero que policía: “Nuestro espíritu no es perseguir al que se dopa, sino garantizar que el que no se dope puede competir con igualdad de oportunidades”.
Uno de cada dos deportistas pasa un control antidoping durante unos juegos olímpicos. Todos los medallistas y los cinco primeros deportistas de la clasificación no se salvan de pasar este tipo de pruebas. Días después de la carrera, el COI descalificó al velocista Ben Johnson después de ganar los 100 metros lisos en los juegos olímpicos de Seúl 1988.
“Todos vimos cómo Ben Johnson se giró con aparente superioridad antes de cruzar la línea de meta para mirar a Carl Lewis –recuerda Segura–. Tanto la victoria como el positivo tuvieron un impacto mundial, y a partir de entonces el dopaje pasó a ser conocido por la opinión pública”.
Segura acepta que las federaciones de ciclismo y de atletismo son las que hacen más controles ya que “en los deportes individuales la ventaja que puede alcanzarse con el dopaje es más definitiva para alcanzar el triunfo que en un deporte colectivo”.
Además de los seres humanos, correr es una estrategia evolutiva que practican más animales. “Los galgos y los caballos de pura raza son fruto de una presión selectiva muy fuerte”, cuenta Denny en su análisis comparativo de estos mamíferos con los humanos.
Galilea añade al cóctel del éxito la agresividad para rendir al máximo. Lo ejemplifica con la carrera deportiva del ciclista Lance Amstrong, de quien dice era un “controlador absoluto del pelotón”, donde nadie se podía mover sin su permiso. “En situaciones de emergencia, las personas responden de una forma imprevisible e incontrolable porque están presionadas por el factor psicológico de la oportunidad del momento”.
Prat explica que en el mundo del deporte se habla del “estado de gracia”, como en flamenco se habla de ‘duende’ y de ‘flow’ en el hip hop. El caso es que en muchas ocasiones, los récords mundiales no se baten en unos juegos olímpicos porque es muy difícil conseguir el máximo rendimiento a todos los niveles para el día de la competición. “Somos de una complejidad tan grande, que nadie conoce los límites del ser humano”, dice Prat.
Algún día se acabarán los récords mundiales, coinciden todos. Pero en los principios fundamentales del olimpismo no entra batirlos. En la carta olímpica se exalta “una filosofía de vida, que combina en un conjunto armónico las cualidades del cuerpo, la voluntad y el espíritu”. Quién sabe si a Usain Bolt también le dijeron de pequeño que lo importante no era ser el primero, sino participar.
Fuente: SINC -
#1835 por otroatletico en 09 Ago, 2012 13:12
-
Nanopartículas de oro capaces de desenrollar las hebras del ADN
CIENCIA DE LOS MATERIALES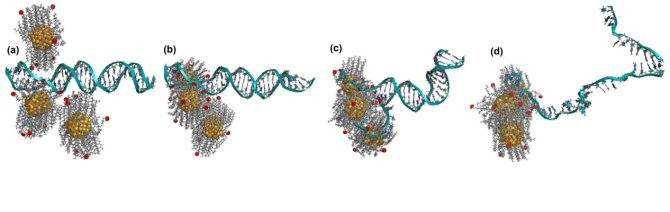
A medida que las nanopartículas de oro se agrupan, separan las hebras del ADN. (Foto: NCSU)
Una nueva investigación ha revelado que unas nanopartículas de oro con leve carga positiva actúan colectivamente de un modo tal que su acción combinada las hace desenrollar la doble hélice del ADN. A medida que estas nanopartículas se agrupan, separan las hebras del ADN.
Este hallazgo es de utilidad para las investigaciones en terapia genética, y también atañe al campo emergente de la electrónica basada en el ADN. La terapia genética es un enfoque consistente en tratar ciertas enfermedades mediante la modificación del ADN en células específicas.
El equipo de Anatoli Melechko, profesor de ingeniería y ciencia de los materiales en la Universidad Estatal de Carolina del Norte, introdujo nanopartículas de oro, de aproximadamente 1,5 nanómetros de diámetro, en una solución que contenía ADN. Las nanopartículas estaban recubiertas con moléculas orgánicas llamadas ligandos. Algunos de los ligandos tenían carga positiva. Otros eran hidrófobos, lo cual significa que eran repelidos por el agua.
Como las nanopartículas de oro tenían una leve carga positiva producida por los ligandos, y el ADN siempre tiene carga negativa, las nanopartículas y el ADN se agrupaban formando complejos conglomerados.
Sin embargo, los investigadores comprobaron que ocurría mucho más que eso: el ADN estaba siendo desenrollado por las nanopartículas de oro. Los ligandos de carga positiva sobre las nanopartículas se adherían al ADN, pero los ligandos hidrófobos sobre las nanopartículas se enredaban unos con otros. A medida que este enredo hacía que las nanopartículas formaran conglomerados, las nanopartículas separaban las hebras de ADN.
Este hallazgo también es relevante para la investigación en electrónica basada en el ADN, la cual pretende usar el ADN como plantilla para crear circuitos nanoelectrónicos. Como algunos trabajos en ese campo requieren colocar nanopartículas metálicas en el ADN, el nuevo descubrimiento indica que los investigadores tendrán que prestar mucha atención a las características de esas nanopartículas, o se arriesgarán a socavar la integridad estructural del ADN.
En la investigación también han trabajado Yaroslava Yingling, Justin Railsback, Abhishek Singh, Ryan Pearce, Ramón Collazo y Zlatko Sitar, todos de la Universidad Estatal de Carolina del Norte, así como Timothy McKnight del Laboratorio Nacional de Oak Ridge, en Tennessee, de Estados Unidos ambas instituciones. -
#1836 por otroatletico en 09 Ago, 2012 13:14
-
Medir la consistencia de un objeto frágil sin valerse del contacto físico de un objeto sólido
FÍSICA
Uso práctico de la técnica. (Foto: © Richard Villey and Frédéric Restagno)
Una manera simple de determinar si un cuerpo es duro o blando es tocarlo con un objeto más duro. El problema con esta técnica es que puede destruir el cuerpo, especialmente si es extremadamente frágil, como es el caso de una burbuja o una célula viva.
Desarrollar un alternativa lo menos invasiva posible ha sido por tanto un objetivo muy perseguido por los físicos.
Para evaluar la rigidez de un objeto sin tocarlo con objetos sólidos, una alternativa relativamente evidente es proyectar contra él un suave flujo de aire, para comprobar si éste lo deforma. Pero controlar con precisión un flujo de aire es difícil a causa de los torbellinos que se pueden formar en el espacio aéreo.
Debido a ello, un equipo de físicos del Laboratorio de Física de la Materia Condensada y de las Nanoestructuras (CNRS / Universidad Claude Bernard Lyon 1) y el Laboratorio de Física de los Sólidos (Universidad de París-Sur / CNRS) optó por usar un "nanoflujo" de fluido que pudiera ser controlado más fácilmente.
A tal fin, los investigadores dispusieron un líquido (en el cual crearon un flujo a escala nanométrica muy débil) entre el objeto investigado y el "medidor". Esta técnica, basada en los últimos avances en nanomecánica, tiene la ventaja de no ser invasiva, y por tanto no ser destructiva, y podría mejorar significativamente las pruebas y análisis de objetos con estructuras delgadas y frágiles, como burbujas o células.
Los investigadores probaron su técnica en una delgada película de elastómero, de sólo algunos cientos de nanómetros de espesor. Concretamente, colocaron la película sobre un soporte de vidrio rígido y sumergieron el conjunto en una mezcla de agua y glicerol. Luego crearon un desplazamiento muy leve del líquido, cercano a la película, valiéndose de un dispositivo especial.
Los investigadores también descubrieron que su método puede ser usado para medir la rigidez de un conjunto de burbujas, algo tan frágil que tocarlo implicaría destruirlo. Ésta es la primera vez que se ha demostrado la posibilidad de medir las propiedades elásticas de un objeto usando un nanoflujo de fluido. Este trabajo inicial abre el camino a una nueva técnica de obtención de imágenes a escala nanométrica para observar las propiedades elásticas de objetos con estructuras muy delgadas, y también se podría aplicar a objetos con estructuras gruesas. -
#1837 por otroatletico en 09 Ago, 2012 13:17
-
El papel benéfico pasado y quizá futuro de un mineral muy reactivo
GEOQUÍMICA
El “óxido verde” tuvo un papel fundamental en los océanos primitivos eliminando el níquel disuelto. En la imagen, una burbuja de metano emergiendo del fondo marino. (Foto: Institute for Exploration / Rhode Island Institute for Archaeological Oceanography
Un tipo de mineral raro que los científicos esperan que pueda ser usado para eliminar del medio ambiente a metales tóxicos e incluso a residuos radiactivos, desempeñó un papel crucial similar hace muchísimo tiempo en la Tierra.
Descubierto en la década pasada, este mineral, a menudo descrito coloquialmente como "óxido verde" o "herrumbre verde" por su aspecto, es un mineral de hierro altamente reactivo.
Una nueva investigación, realizada por un equipo internacional de biogeoquímicos, sugiere por primera vez que ese mineral probablemente fue común en los océanos primitivos y que pudo desempeñar un papel vital en la creación de nuestra atmósfera primitiva.
Los resultados de la investigación hecha por el equipo de Simon Poulton de la Universidad de Newcastle en el Reino Unido, y Sean Crowe de la Universidad del Sur de Dinamarca, muestran que durante el período Precámbrico, este óxido verde retiró del agua a metales pesados tales como el níquel, desempeñando así un papel clave en una cadena de procesos que condujo a la oxigenación de la atmósfera de la Tierra.
El descubrimiento del óxido verde en el lago Matano, Indonesia, donde Poulton y otros realizaron sus experimentos pioneros, ha mostrado por primera vez el papel fundamental que este mineral desempeñó en los océanos primitivos eliminando el níquel disuelto, un micronutriente clave para la metanogénesis.
Al ser tan reactivo, el óxido verde había sido encontrado en la naturaleza sólo en raras ocasiones, y nunca en un sistema hidrológico como ese. Aún se sabe poco sobre el óxido verde, pero los resultados de la nueva investigación muestran que probablemente sea mucho más común en el medio ambiente de lo que se pensaba, y que el papel que desempeña en los ciclos de elementos como el níquel y otros metales es significativo.
La alta reactividad del óxido verde es la razón por la que podría ser de tanta ayuda para limpiar lugares afectados por ciertas clases de contaminación. Este óxido reduce a elementos como el cromo, el uranio y el selenio, disminuyendo significativamente la solubilidad y movilidad de estos en el entorno, y en algunos casos absorbiéndolos dentro de la estructura molecular del óxido.
En la investigación también han trabajado especialistas de la Universidad de Nancy, ubicada en la ciudad francesa de ese nombre, la Universidad de Leeds en el Reino Unido, la de Bruselas en Bélgica, la de Kansas en Estados Unidos, el Instituto Indonesio de Ciencias y la empresa Canadian Light Source Inc. en Canadá. -
#1838 por otroatletico en 09 Ago, 2012 13:20
-
Una herramienta on line y gratuita permite identificar murciélagos europeos
ZOOLOGÍA
(Imagen: Hugh Clark)
Un equipo internacional de ecólogos liderado por la Sociedad Zoológica de Londres ha desarrollado iBatsID, un software de clasificación de especies de murciélagos, cuyas poblaciones han disminuido en toda Europa durante los últimos 50 años.
“iBatsID proporciona un método rápido, sencillo y gratuito para identificar a los murciélagos en Europa, de una manera objetiva y comparable. Esto permite un análisis rápido de los numerosos datos de los programas de vigilancia continental”, declara a SINC Charlotte L. Walters, de la Sociedad Zoológica de Londres y autora principal del estudio que publica el Journal of Applied Ecology.
Esta nueva herramienta logra identificar cómo cambia la distribución de las especies y proporciona datos a los conservacionistas para que decidan la mejor manera de protegerlos.
“Se han producido descensos significativos del número murciélagos en toda Europa desde mediados del siglo XX. Como resultado, todos están protegidos por la Directiva de Hábitats de la UE, que incluye a algunas de las especies más raras, como por ejemplo, los murciélagos de herradura, que son una prioridad de conservación”, apunta la experta.
La herramienta identifica a los murciélagos por los sonidos que emiten y que, al rebotar contra los objetos, les permiten interpretar su entorno con un sistema de ‘biosónar’. Los investigadores seleccionaron 1.350 llamadas de 34 especies europeas del EchoBank, una biblioteca de ecolocalización global de más de 200.000 llamadas de murciélagos, que se analizaron para determinar qué rasgos son más útiles en la diferenciación de especies.
Según Walters, hay muchas medidas que caracterizan una llamada de ecolocalización, como su duración, la máxima y mínima frecuencia, etc.; sin embargo, no se sabía cuáles servían para distinguir especies. Se seleccionaron 12 parámetros de llamada útiles para entrenar las redes neuronales artificiales que componen iBatsID, que identifica un total de 34 especies.
Existen aproximadamente 42 especies de murciélagos en toda Europa, de acuerdo con la última edición de Wilson y Reeders de Especies de Mamíferos del Mundo, una publicación de referencia taxonómica en zoología.
Actualmente, se enfrentan a presiones tales como la pérdida de lugares de descanso en los árboles y edificios o de hábitats de alimentación en los bosques, prados, parques y jardines. El descenso del número de insectos y la fragmentación del hábitat ocasionan también la pérdida de corredores verdes que proporcionan conectividad en el paisaje.
“Hasta el momento se han utilizado un gran número de métodos para identificar a los murciélagos acústicamente con una precisión variable. Esto hace que sea muy difícil extraer conclusiones fiables acerca de cómo cambian y se comportan sus poblaciones”, subraya Walters.
iBatsID tiene una precisión para identificar entre el 83% y el 98% de las llamadas de murciélago de forma correcta, aunque algunas especies como las del género Myotis son más difíciles de distinguir, incluso con iBatsID –entre un 49% y un 81% en este caso–.
"Los murciélagos son muy sensibles a cambios, así que si las poblaciones están disminuyendo, sabemos que algo malo pasa en su entorno y nos pueden dar una idea de lo que está ocurriendo con la biodiversidad en general", concluye Walters.
Fuente: SINC -
#1839 por otroatletico en 09 Ago, 2012 13:22
-
Duplicar mediante la rugosidad de una superficie la transferencia de calor en ciertos sistemas de disipación
CIENCIA DE LOS MATERIALES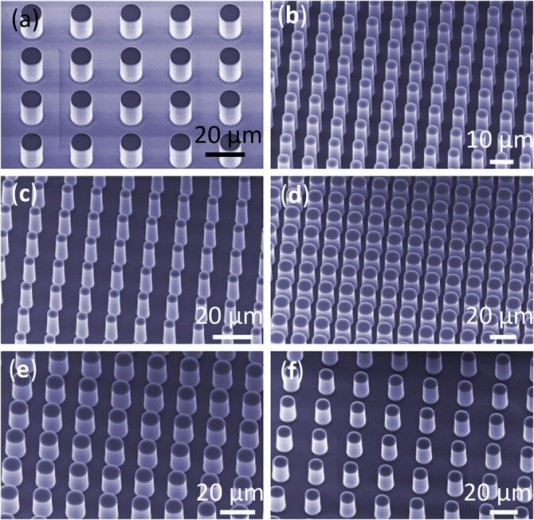
Superficies diversas para los experimentos. (Foto: Kuang-Han Chu et al, Applied Physics Letters)
Mediante un nuevo análisis de texturas de superficies se podría mejorar la transferencia de calor en dispositivos muy diversos, que van desde chips de ordenador hasta centrales eléctricas.
Los sistemas de enfriamiento que usan un líquido que cambia de fase (como por ejemplo agua que hierve sobre una superficie) pueden desempeñar un papel importante en muchas tecnologías en desarrollo, incluyendo a sistemas de concentración de energía solar y microchips avanzados. Pero alcanzar un conocimiento profundo sobre cómo exactamente funcionan esos sistemas y qué tipos de superficies maximizan la transferencia de calor, no ha sido posible hasta ahora.
En un estudio reciente, unos investigadores del Instituto Tecnológico de Massachusetts (MIT), en Cambridge, Estados Unidos, han comprobado que dotar a una superficie con una textura rugosa relativamente simple, trabajada a microescala, puede aumentar de modo espectacular (hasta más del doble) la transferencia de calor.
Este enfoque podría resultar mucho menos complejo y más duradero que las estrategias que mejoran la transferencia de calor creando texturas trabajadas a escala nanométrica. La nueva investigación también proporciona un marco teórico para analizar el comportamiento de tales sistemas, indicando el camino a seguir para obtener mejoras aún mayores.
La disipación de calor es un problema importante en muchos campos, especialmente en la electrónica. El uso de líquidos que cambian de fase para transferir el calor lejos de una superficie ha sido un área de gran interés durante muchas décadas. Pero hasta ahora no se había conseguido una buena comprensión de los parámetros que determinan cómo diferentes materiales, y especialmente la textura de la superficie, pueden afectar a la eficiencia de la transferencia de calor. Debido a la complejidad del proceso de cambio de fase, sólo recientemente se ha alcanzado una capacidad técnica apropiada de manipular superficies para optimizar el proceso, gracias a los avances en la microtecnología y la nanotecnología.
El equipo de Kuang-Han Chu, Ryan Enright y Evelyn Wang ha determinado que la razón por la que la rugosidad de la superficie aumenta grandemente la transferencia de calor es que mejora la acción capilar en la superficie, ayudando a mantener burbujas de vapor "clavadas" a la superficie de transferencia de calor, lo cual demora la formación de una capa de vapor que reduzca significativamente el enfriamiento. -
#1840 por otroatletico en 09 Ago, 2012 13:25
-
Láminas de grafeno para desalinizar agua con mayor eficacia
QUÍMICA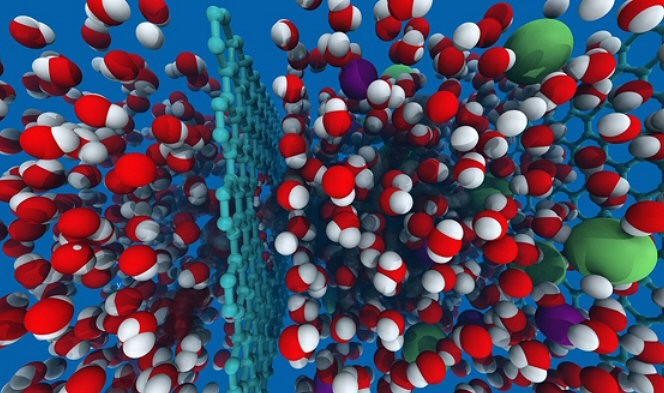
Esquema de la interacción entre las moléculas de agua con el grafeno. (Foto avid Cohen-Tanugi)
avid Cohen-Tanugi)
Las hojas de grafeno con poros de dimensiones controladas con precisión ofrecen la posibilidad de purificar el agua más eficazmente que con los métodos existentes.
La disponibilidad de agua dulce está disminuyendo en muchas partes del mundo, un problema que se teme que crezca junto con la población mundial. Una fuente prometedora de agua potable es el suministro virtualmente ilimitado de agua de mar, pero hasta ahora la tecnología de la desalinización ha sido demasiado cara para que se extienda su uso de forma generalizada.
Ahora, unos investigadores del Instituto Tecnológico de Massachusetts (MIT), en Cambridge, Estados Unidos, han dado con un nuevo método, basado en un tipo diferente de material para el filtrado: hojas de grafeno.
El grafeno consiste en una capa carbono de un átomo de espesor. Los átomos, distribuidos por tanto sólo horizontalmente, forman una celosía hexagonal, similar a la de un panal de miel.
El nuevo método de desalinización promete ser más eficiente y posiblemente menos caro que los sistemas de desalinización existentes.
El equipo de Jeffrey Grossman y David Cohen-Tanugi se propuso controlar las propiedades del material a escala atómica, produciendo una hoja de grafeno perforada con agujeros de dimensiones muy precisas. Los investigadores también agregaron otros elementos al material, logrando que los bordes de estas minúsculas aberturas interactuaran químicamente con las moléculas de agua, repeliéndolas o atrayéndolas.
Los científicos quedaron muy agradablemente sorprendidos por lo bien que funcionó el grafeno en las simulaciones digitales, comparado con los sistemas existentes.
Un método común de desalinización, llamado ósmosis inversa, usa membranas para filtrar la sal del agua. Pero estos sistemas requieren una presión sumamente alta, y por tanto también un consumo alto de energía, para forzar el agua a través de gruesas membranas, que son aproximadamente mil veces más gruesas que el grafeno.
El nuevo sistema con grafeno opera a una presión mucho más baja, y gracias a ello debería ser capaz de purificar el agua a un costo mucho más bajo.
El nuevo sistema basado en el grafeno es capaz de hacer su trabajo cientos de veces más rápido que las técnicas actuales, con la misma presión que éstas. O, alternativamente, el sistema puede funcionar con una velocidad similar a la de los sistemas actuales, aunque con presiones más bajas que las de estos.
[youtube]http://www.youtube.com/watch?v=k5Tjy_90WBU&feature=player_embedded[/youtube] -
#1841 por otroatletico en 09 Ago, 2012 13:27
-
Avión contra incendios sin tripulación
AERONÁUTICA
Singular Aircraft es una empresa de I+D basada en el Reino Unido que, desde su planta de producción en Cornellà de Llobregat, en España, ha desarrollado un avión anfibio no tripulado para la extinción de incendios.
La mayor innovación reside en que el avión se pilota desde una cabina de mando en tierra, pudiendo acceder a lugares donde el riesgo del piloto es elevado, y descargando 2.000 litros de agua en intervalos de 2 minutos puesto que las aeronaves trabajan en flota, tanto de día como de noche.
El hecho de poder contar con una flota de estas aeronaves es debido al bajo coste, tanto de adquisición por unidad como de coste operativo por hora. Cada unidad sale a la venta a partir de 300.000€ mientras que el coste operativo se sitúa en 200€/hora. Actualmente, las aeronaves capaces de hacer estas tareas, se venden a partir de 1,5 millones de Euros y su coste operativo está alrededor de los 2.000€/hora, trabajando sólo de día y asumiendo un alto riesgo de accidente mortal por parte de los pilotos.
Aunque la primera versión ha sido diseñada para la extinción de incendios, durante el desarrollo se han creado diferentes modalidades de compartimento y con pequeñas variaciones se puede utilizar la misma aeronave para tareas de vigilancia, de fumigación o de transporte de carga. -
#1842 por otroatletico en 09 Ago, 2012 13:31
-
¿Hacia el disc-jockey robótico?
ROBÓTICA
El robot Shimi. (Foto: GIT)
En un ejemplo más de robótica al servicio del ocio, se ha desarrollado un pequeño pero llamativo robot que recomienda canciones, baila al ritmo de la música, y ajusta parámetros de la reproducción de la música basándose en las reacciones del oyente.
El robot se llama Shimi, mide unos 30 centímetros de estatura, y su creador principal es Gil Weinberg, director del Centro de Tecnología Musical, dependiente del Instituto Tecnológico de Georgia (Georgia Tech) en Atlanta, Estados Unidos.
Shimi basa buena parte de sus capacidades en su alta conectividad. Su cerebro se alimenta de un teléfono móvil equipado con el sistema operativo Android. Una vez interconectado debidamente, el robot adquiere las capacidades de percepción y generación musical del dispositivo móvil del usuario.
Por ejemplo, usando la cámara del teléfono y un software de detección de rostros, el robot puede seguir por la habitación a la persona que escucha la música y posicionar apropiadamente sus altavoces para lograr un sonido óptimo. Este robot tiene además otra función de reconocimiento que se basa en el ritmo y el tempo. Si el usuario tamborilea un ritmo sobre la mesa o lo marca dando palmadas, Shimi lo analiza, explora la biblioteca musical del teléfono y reproduce inmediatamente la canción que mejor se corresponda con la sugerencia. Una vez que comienza la música, Shimi baila al ritmo de ésta.
Shimi se comercializará a través de la empresa Tovbot. Se calcula que saldrá al mercado en 2013.
Shimi fue desarrollado en colaboración con el Centro Interdisciplinario Herzliya, de Israel. Además de Weinberg, en el trabajo también han participado Guy Hoffmann, Ian Campbell y Roberto Aimi.
Éste es el tercer robot musical creado en el Centro de Tecnología Musical. Haile, el primero, es un robot percusionista que ha tocado en auditorios de muchas partes del mundo. El segundo es Shimon, un robot especializado en tocar la marimba, y que usa algoritmos más sofisticados para la percepción e improvisación musicales que los usados por Haile. Shimon es capaz de interactuar con el ambiente alrededor de él, analizar el ritmo, las melodías y la armonía, y usar su comprensión musical para improvisar con los humanos.
[youtube]http://www.youtube.com/watch?v=s6bs1rrOwxo&feature=player_embedded[/youtube]
[youtube]http://www.youtube.com/watch?v=3ShaUMM0H-g&feature=player_embedded[/youtube]
[youtube]http://www.youtube.com/watch?v=WE1q_HYiLcU&feature=player_embedded[/youtube] -
#1843 por otroatletico en 09 Ago, 2012 13:34
-
Las piernas para robot mejor capacitadas para emular el modo humano de andar
ROBÓTICA
Las nuevas piernas robóticas. (Foto: IOP / Journal of Neural Engineering)
Se ha logrado desarrollar un par de piernas robóticas que parece ser el primero que reproduce el andar humano con una precisión lo bastante elevada como para concordar con el modelo biológico.
La arquitectura neuronal, la arquitectura musculoesquelética y las vías de realimentación sensorial de los humanos fueron simplificadas e implementadas en las piernas robóticas, permitiéndoles de este modo caminar de un modo impresionantemente parecido a como lo hacen unas piernas humanas.
La exactitud biológica en los movimientos de estas piernas robóticas desarrolladas por el equipo de Theresa Klein, de la Universidad de Arizona, ha permitido a los investigadores estudiar los procesos subyacentes en el modo humano de andar y puede respaldar algunas teorías sobre cómo aprenden a caminar los bebés. Esta precisión tan notable también puede ser de utilidad para encontrar modos de que algunos afectados por lesión de médula espinal puedan recobrar una cierta capacidad de caminar.
Un componente clave del sistema humano de andar es el generador central de patrones, que genera señales musculares rítmicas. Este sistema biológico produce dichas señales, y luego las controla, gracias a recopilar información procedente de diferentes partes del cuerpo que están respondiendo al entorno. Esto es lo que permite a la gente caminar sin necesidad de pensar en ello.
Las nuevas piernas robóticas contienen un sistema parecido a éste, así como sensores que envían información al módulo que actúa como un generador central de patrones, a fin de que éste pueda hacer los ajustes que se necesiten en cada momento, como por ejemplo si la inclinación del nuevo tramo de terreno es distinta.
Estas piernas robóticas han sido presentadas públicamente a través de la revista académica Journal of Neural Engineering, del IOP.
[youtube]http://www.youtube.com/watch?v=MnD7LqisBhM&feature=player_embedded[/youtube] -
#1844 por otroatletico en 09 Ago, 2012 13:36
-
Pinzas ultrasónicas para sujetar seres vivos pequeños
INGENIERÍA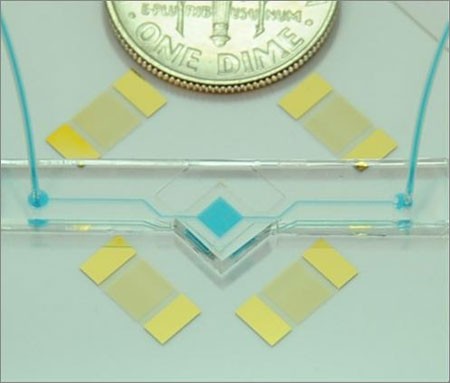
El dispositivo, comparado con una moneda. (Foto: Xiaoyun Ding, Sz-Chin Steven Lin, Stephen J. Benkovic, y Tony Jun Huang - Penn State)
Un nuevo dispositivo de tamaño similar al de una moneda pequeña puede manipular mediante ondas sonoras materiales vivos como por ejemplo células sanguíneas (glóbulos) e incluso animales diminutos enteros.
Este singular dispositivo, al que se puede describir como unas pinzas acústicas, es la primera tecnología capaz de atrapar y manipular sin contacto físico directo a un Caenorhabditis elegans, un gusano de un milímetro de largo que es un importante modelo biológico para estudiar enfermedades humanas. Las pinzas acústicas también son capaces de manipular con precisión objetos del tamaño de una célula que son esenciales para muchas áreas de la investigación biomédica básica.
Las pinzas acústicas utilizan ultrasonido, la misma tecnología no invasiva que los médicos usan para captar imágenes del feto en el útero. El dispositivo se basa en un material piezoeléctrico que se mueve bajo la acción de una corriente eléctrica. Las vibraciones pasan a través de transductores adheridos al sustrato piezoeléctrico, donde son convertidas en ondas acústicas especiales que crean campos de presión en el medio líquido donde está el espécimen. Estos campos sujetan al espécimen.
El dispositivo está equipado con un sistema sencillo pero eficaz de control, que permite adecuar las ondas acústicas para sujetar y mover con precisión y de modo no invasivo al espécimen u objeto inorgánico.
El equipo de Tony Jun Huang, de la Universidad Estatal de Pensilvania, cree que su aparato podrá ser fabricado en grandes cantidades de forma fácil y con un coste muy inferior que por ejemplo las pinzas ópticas, una clase de dispositivos que usan láseres para manipular partículas individuales. Las pinzas ópticas necesitan densidades de energía 10 millones de veces mayores que las pinzas acústicas, y los láseres pueden calentar y dañar a las células, a diferencia del ultrasonido.
Las pinzas acústicas son muy versátiles. Con ellas se puede manipular desde una célula individual hasta decenas de miles de células al mismo tiempo.
En la investigación también han trabajado Stephen Benkovic, Xiaoyun Ding, Sz-Chin Steven Lin, Brian Kirby, Hongjun Yue, Sixing Li y Jinjie Shi.
otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

otroatletico

!! ADVERTENCIAS !!: Las informaciones aquí publicadas NO CONTIENEN KEYS para la decodificación de ningún sistema: NO SON OPERATIVOS en sistemas SAT que precisen de su correspondiente suscripción.
ESTA TOTALMENTE PROHIBIDO EL USO DE ESTAS INFORMACIONES PARA LA MODIFICACIÓN O DEFRAUDACIÓN DE SISTEMAS DE ACCESO CONDICIONAL.
EN ESTOS FOROS NO SE PERMITE LA PUBLICACIÓN DE INFORMACIONES ILEGALES POR PARTE DE LOS USUARIOS. EN CASO DE DETECTARSE ESTE TIPO DE INFORMACIONES, LOS USUARIOS SERÁN EXCLUIDOS DE ESTAS PÁGINAS.
PROHIBIDA LA PUBLICACIÓN DE ENLACES A FIRMWARES ILEGALES
LOS FOROS NO SON MONITORIZADOS DE MANERA CONSTANTE, CUALQUIER INFORMACIÓN QUE PUEDAS CONSIDERAR ILEGAL REPORTALA A LA ADMINISTACIÓN DEL FORO
PROHIBIDA LA PUBLICACIÓN DE ENLACES A FIRMWARES ILEGALES
LOS FOROS NO SON MONITORIZADOS DE MANERA CONSTANTE, CUALQUIER INFORMACIÓN QUE PUEDAS CONSIDERAR ILEGAL REPORTALA A LA ADMINISTACIÓN DEL FORO